商机详情 -
零件搬运桁架机械手制造标准
桁架机器人铝型材比较大截面尺寸可达200mmx300mm。为了方便安装,同时提供多种规格的支架、T型螺母等安装配件,还可提供机器框架和结构的整套设计方案,并提供相应的3D文件包。相对于钢材而言,导轨铝型材可以节省材料费用和装配时间,装配也更加方便和简易。超大截面工业铝型材可作桁架、龙门横梁、构造梁用的直线导轨安装铝型材。桁架机器人铝材选用度铝合金,经应力消除处理后再经196℃处理,可保证长期使用后仍保有良好的精密度。工厂自动化的物料输送运用中,经常会有超长距离的直线运动,可以用超长铝型材来作为超长直线导轨的安装梁。超长铝型材通常有以下两种拼接方式:一、通过T型槽内的T型导条来固定连接板,通常用于一般大小的铝型材中;二、在T型槽上打孔,用度螺栓来固定位于铝型材腔体内的连接板,通常用于大型铝型材中,因为需要更高的连接刚性。鸿姿传动铝型材材质表面处理:用户可根据不同的工作环境选择产品本色阳极氧化、硬质氧化、彩色氧化、染黑氧化、喷砂氧化、钝化、化学镀镍等表面处理方式。特殊要求可达到5599英国国家标准、AMS2469C太空材料规格及MIL-A-8625ETYPEⅢ规格等材质。桁架机械手也称为桁架上下料,三坐标,直角坐标机械手。桁架机械手设备,就选浙江勃展工业自动化设备有限公司。零件搬运桁架机械手制造标准

上下料桁架机械手通常用作机床或其他机器的附加装置,如在主动机床或主动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有**的控制装置。使用上下料桁架机械手能够替代人从事单调、重复或繁重的体力劳动,完成生产的机械化和主动化,替代人在有害环境下的手工操作,改进劳动条件,确保人身安全,因而***使用于机械制造、冶金、电子、轻工和原子能等部分。数控机床上下料桁架机械手首要由于手部和运动机构组成。手部是用来抓持工件(或工具)的部件,依据被抓持物件的形状、尺寸、重量、资料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构使手部完成各种滚动(摇摆)、机械手配件移动或复合运动来完成规则的动作,改变被抓持物件的方位和姿势。零件搬运桁架机械手制造标准浙江勃展工业自动化设备有限公司是一家专业提供桁架机械手设备的公司,欢迎您的来电哦!

机器人纸箱码垛机创新的码垛技术在许多行业中,不*袋装货物需要托盘化,还需要纸箱,纸板箱,板条箱或罐子。具有抓手元件的灵活机器人纸箱码垛机,以满足这些物品的不同要求。确保了前列的堆叠质量,温和的产品处理和高可靠性。创新的码垛技术使用专门开发的夹具元件,可以对各种类型的包装进行码垛和卸垛。界面控制确保用户友好的操作,并灵活调整不断变化的使用条件。即使是具有不同基本参数的复杂过程也可以以可靠和有效的方式解决。当托盘上形成层时,系统具有能效和高精度。它们也适用于袋装产品,并且可以非常容易地进行重新配置,以便频繁更换产品。
助力机械手主机本体:助力机械手主机本体根据结构形式分为软索式和硬臂式 2 大类。软索式助力机械手通常与滑动轨道配合使用,它的特点是服务范围较大、与其他助力机械手相比,使用更轻便灵活,缺点是在助力机械手和工件之间有障碍物时不便于使用,以及对工人的操作熟练程度要求高一点(想想大家刚开始学骑自行车时的感觉)。**夹具:是整个助力机械手系统中****的部分之一,整个系统是否好用也主要由夹具设计的好坏决定,它完全是根据客户使用的工艺要求和工件状态而专门定制的,因此它是一种非标设计,平时我们工程师的主要工作也集中在这一部分,桁架机械手设备,就选浙江勃展工业自动化设备有限公司,有需要可以联系我司哦!
重型桁架式机械手优点:采用**度结构钢,整体强度高,不易振动摇晃。滚轮导轨运动机构,承载能力极强,刚性可以。安装调整要求低,相比于繁杂的关节机器人,结构设计便于人员理解、操作简单、维护方便。使用周期长,不会像普通直线导轨滑块易受加工精度及润滑影响失效损坏。便于维护,导轨极易维护,即使损坏更换也极其方便。可配置为全闭环系统,即会实时检测机械手控制系统发出指令和实际位置是否一致(如非全闭环、齿轮损坏等实际不移动不准确,而控制系统无法感知),Z轴检测到往下掉时可机械锁止,防止发生安全事故。浙江勃展工业自动化设备有限公司为您提供桁架机械手设备,欢迎您的来电!零件搬运桁架机械手制造标准
浙江勃展工业自动化设备有限公司为您提供桁架机械手设备,有需求可以来电咨询!零件搬运桁架机械手制造标准
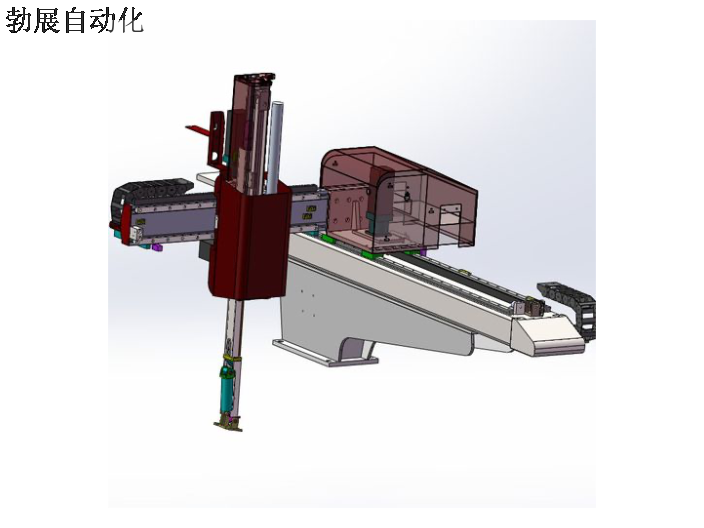
桁架机械手的上料过程的动作:数控机械手臂沿X轴运动到工件取料位置的上方后停止,然后Z轴向下运动使张开的手爪刚好能抓住工件,闭合手抓住工件后,使Z轴再向上运动到指定高度,再沿X轴方向运动到工作台卡盘正上方、Z轴向下运动把工件装入到卡盘或工装内、卡盘夹紧、Z轴上升到超出机床防护罩上方、X轴再运动到等待位置等待机床完成工件的加工。桁架机械手下料过程的工作:完成工件加工后,X轴运动到卡盘的正上方,Z轴向下运动使手爪刚好能抓住工件,然后给气压使手爪合并抓住工件,卡盘松开,Z轴向上运动到合适的高度,沿X轴方向运动直至Z轴到放料位置,Z轴下降到放料点,张开手爪放料完成后提升Z轴,再转入下一个上料过程。以上工作安排的路径需要与桁架机械手配套的上下料机构如料盘、卡盘等的位置在同一条直线上,这样才能满足机械臂做X-Z两维运动的要求。如果实际情况较难满足,可以为机械臂再增加一个Y轴,这样数控机械臂就可以进行X-Y-Z三轴三维运动了,灵活度可以**增强。零件搬运桁架机械手制造标准