商机详情 -
苏州桁架机械手展示
桁架机械手由三个基本部分组成:主体、驱动系统和控制系统。机器人根据其结构分为笛卡尔坐标系,机械手沿二维笛卡尔坐标系运动。主体部分通常采用龙门结构,由Y方向横梁及导轨、Z方向闸板、十字滑座、立柱、过渡连接板、底座等组成。Z方向直线运动为交流伺服电机,通过蜗轮减速器带动齿轮滚动,齿条固定在Y方向横梁和Z方向滑枕上,带动运动部件沿导轨快速移动。运动部件为轻型十字滑动座和Z向闸板,闸板采用铝合金型材。横梁采用方钢型材,导轨和机架安装在横梁上,通过滚轮与导轨接触,整个机械手悬挂在横梁上。桁架机械手设备,就选浙江勃展工业自动化设备有限公司,用户的信赖之选,欢迎您的来电哦!苏州桁架机械手展示

桁架机械手是一种建立在直角x,y,z三坐标系统基础上,对工件进行工位调整,或实现工件的轨迹运动等功能的全自动工业设备。然而现有的桁架机械手上竖直方向的传动齿轮与减速机输出端多是直接进行安装的,使得齿轮的受力状况较为复杂,且在传动过程中由于导向部件较为单一,使得齿轮以及减速机的传动稳定性较差,进而降低机械手上的减速机以及齿轮使用寿命,因此急需一种新型的桁架机械手来解决现有问题。技术实现要素:要解决的技术问题为了克服现有技术不足,现提出桁架机械手,解决了现有的桁架机械手上竖直方向的传动齿轮与减速机输出端多是直接进行安装的,使得齿轮的受力状况较为复杂,且在传动过程中由于导向部件较为单一,使得齿轮以及减速机的传动稳定性较差,进而降低机械手上的减速机以及齿轮使用寿命的问题。技术方案本实用新型通过如下技术方案实现:本实用新型提出了桁架机械手,包括传动架、轴承固定座以及直线导轨一,所述传动架上端一侧通过螺栓连接有输入马达,所述输入马达的传动输出端通过螺栓连接有减速机,所述减速机的传动输出端通过键连接有齿轮。 苏州桁架机械手展示浙江勃展工业自动化设备有限公司致力于提供 桁架机械手设备,欢迎新老客户来电!
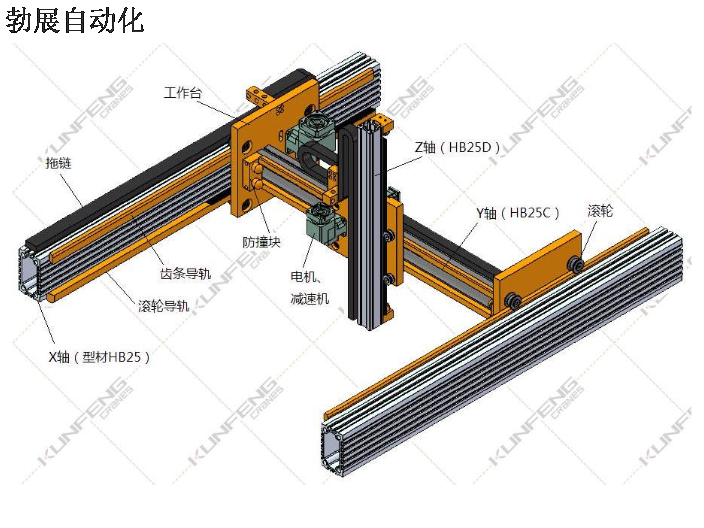
桁架机器手是通过指令行事的,基本上好的指令能让桁架机器人好的运行,桁架机器手的所有动作都是根据程序员预先设计的指令行事的。一般来说,在安装调试的时候,会要求厂家派出一到两个人全程配合,目的就是让客户了解和使用车床机器人。桁架机器手的操作指令,允许送料:车床到达原点位置,主床机器人开始到车床取料和放料。主轴低速:控制主车床夹头低速旋转,特殊的时候才会用到。启动开盘松开:主车床的夹头松开,桁架机械手料仓,车床中才可以取料和放料,桁架机械手设计,如果夹头是夹紧的状态,是不能放料和取料。主允许车床加工:桁架机器人到达安全位置之后,才可以启动车床进行加工。启动卡盘夹紧:桁架机器人在松开原料时,夹紧工件。在现代工业中,工业机械手公司,生产过程中的自动化已成为突出的主题,各行各业的自动化水平越来越高,使用数控加工中心加工工件时,要求工件在工作台上具有非常高的定位精度,且需要保证每次上料的一致性。通过完善的经营管理制度,鼓励创新机制,确保机床质量前端的同时,致力于对工作质量的日益改进和完善。桁架式机器人机械手由结构框架、X轴组件、Y轴组件、Z轴组件、工装夹具以及控制柜,六部分组成。
桁架机械手是能够实现自动控制、可重复编程、多功能、多自由度、运动自由度间成空间直角关系、多用途的操作机。具体所含有的特点有:可以在一些比较恶劣的环境中进行长期的工作。运行过程中,有着非常高的可靠性、速度以及精度性。可以根据用户所配套的操作工具不同,自身所携带来的功能也将会是不同。以上所述的三点,便是属于日常生活中市场上常见桁架机械手所含有的特点。桁架机械手的三大部件究竟是什么样子的。下面就请大家一起来看看吧!手部:桁架机械手的这个部位,往往是采用了丝杆螺母的结构。腕部:桁架机械手这个部位,则是采用了一个步进电机来带动涡轮杆。臂部:设备的这个部位,则是次用了滚珠丝杆来进行工作。以上所述的三点,便是属于在桁架机械手上的三部件样貌。桁架机械手设备,就选浙江勃展工业自动化设备有限公司,欢迎客户来电!

桁架机械手功能:为了适应灵活的生产要求,桁架机械手系统所有控制功能应该整合,从而达到菜单管理的全套模式,主要包括滑块行程调整,平衡装置空气压力调整,气垫行程调整和自动控制系统设置参数。现场总线技术与通信网络设备互联、互动的可操作性,分散功能模块和开放功能是冲压控制技术的发展方向,对实现自动化具有明显的促进作用。按控制系统的集成可以实现媒体和模具的所有控制功能通过一个操作界面,包括故障诊断、模具菜单配置,可编程的限位开关,模具监控和调整等等,使设备的维护更方便,明显提高设备的有效工作时间。浙江勃展工业自动化设备有限公司为您提供桁架机械手设备,有需求可以来电咨询!苏州桁架机械手展示
浙江勃展工业自动化设备有限公司是一家专业提供桁架机械手的公司,期待您的光临!苏州桁架机械手展示
气动助力机械手设计需要注意什么?助力机械手的杠杆率为1:5、1:6、1:7.5和1:10,其中1:6的杠杆率为标准规格。如果增加杠杆率,工作范围可以扩大,但较大增加应相应减少。在铸造、锻造等灰尘较多的厂房使用时,应对旋转减速箱进行良好的密封,否则会影响其使用寿命。平衡臂旋转部分的轴承应用黄油密封。小横臂要有足够的刚度。如果平衡臂满负载上升,小横臂因刚度不足而变形,会影响负载时平衡区的变化。大横臂、小横臂、起重臂、支撑臂等零件的孔距应保证附着杠杆率,否则也会影响空载时平衡区域的变化。旋转减速箱的旋转座上两个轴承之间的距离不应太小,否则会对机械手的旋转部分造成颠覆。安装固定气动助力机械手时,必须先调整水平导向槽的水平度,不水平度不得超过0.025/100毫米。苏州桁架机械手展示