商机详情 -
六轴机械手原理
工业机械手是电子制造行业实现自动化生产的中心设备,通过六轴关节结构模拟人类手臂动作,完成精密元件的组装与检测。其末端执行器可快速更换夹爪、吸盘等工具,适配电阻、电容、芯片等微小零件。在智能手机生产线,工业机械手能以0.3秒/件的速率完成屏幕贴合工序,通过视觉定位系统确保组件对齐精度。设备采用总线通信协议,与贴片机、回流焊炉等设备形成闭环控制系统,实现生产数据的实时同步。其内置力控传感器能感知装配压力,避免压坏脆弱元件。此外,工业机械手支持离线编程,工程师可通过仿真软件预先优化动作轨迹,缩短现场调试时间。设备表面进行防静电处理,适应无尘车间环境,故障率低于0.1%。激光切割机机械手在广告制作中,实现金属字的高效切割。六轴机械手原理
伺服机械手是一种采用伺服电机驱动的自动化设备,通过闭环控制实现高精度动作。在光学元件加工车间,伺服机械手可抓取直径5毫米的镜片,进行镀膜与检测作业。设备采用低摩擦导轨与高刚性臂架,确保运动过程中的微小振动抑制。其配备的力传感器实时监测抓取力度,避免脆性物料破损。伺服机械手表面进行防静电处理,避免元件吸附灰尘,维护时只需定期校准传感器即可保持性能。此外,设备支持与加工机床联动,通过I/O信号自动交换动作指令,实现无人化生产。其动态响应时间低于10毫秒,卓著提升生产节拍。六轴机械手原理自动化机械手内置安全传感器,检测障碍物自动暂停。

机械手的安装调试需遵循规范流程,确保设备性能与作业需求相匹配。安装前需完成现场勘察与基础准备,根据机械手的型号与作业范围,规划安装空间,确保场地无障碍物,基础承重能力符合设备要求。安装过程中,需精细定位底座位置,保障设备水平度与稳定性,随后依次完成手臂、腕部及末端执行器的组装,连接驱动系统与控制系统线路,确保线路连接牢固、布局规整。调试阶段需先进行空载试运行,检查各关节运动的灵活性与协调性,随后进行负载调试,逐步增加作业负载,测试设备的运动精度与受力状态,根据调试结果调整参数,确保机械手能够稳定完成预设作业。
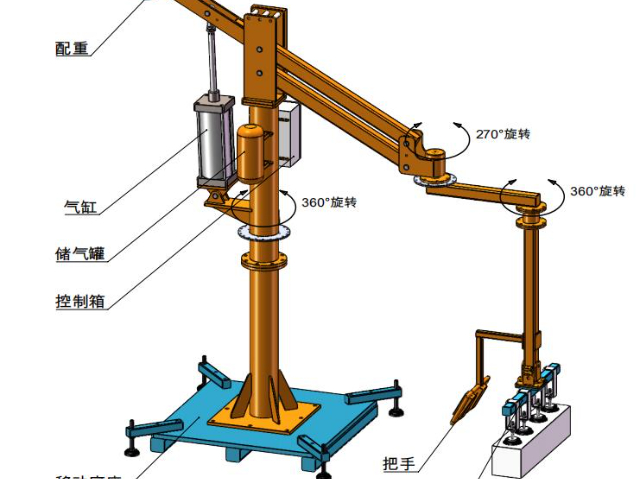
PPU机械手是一种专为物料搬运设计的设备,通过平行四边形结构与气动驱动组合,实现水平与垂直方向的同步运动。设备采用轻量化材质臂体,动作节拍可达0.5秒/次,适应高频次作业场景。在食品加工厂,PPU机械手可抓取包装盒、瓶装物料进行装箱与码垛作业,通过真空吸盘或夹具实现无损搬运。其配备的模内监控系统能实时检测物料位置,自动调整抓取角度。设备表面进行防粘处理,避免食品残留物附着,清洁时只需用酒精擦拭即可。此外,PPU机械手支持与输送线联动,通过传感器实现物料到位检测,提升搬运效率。其模块化设计允许根据物料尺寸更换末端工具,如吸盘、夹爪等,提升设备通用性。伺服机械手通过总线通信,实现与数控机床的协同作业。
焊接机械手是钢结构制造的中心设备,通过六轴关节结构实现复杂焊缝的自动化焊接。其腕部搭载激光跟踪系统,可实时调整焊枪角度与速度,确保焊缝成型美观。在桥梁建设领域,焊接机械手可完成厚度达50毫米的钢板对接焊,焊接效率比人工提升3倍。设备采用双脉冲焊接技术,减少热影响区范围,避免板材变形。其配备的烟尘净化装置能自动收集焊接废气,改善作业环境。此外,焊接机械手支持离线编程功能,工程师可通过三维模型模拟焊接路径,减少现场调试时间。设备表面进行耐高温处理,适应连续焊接作业,维护时只需更换焊丝导管即可恢复性能。隧道湿喷机械手采用耐磨损材质,适应潮湿施工环境。六轴机械手原理
全自动码垛机械手在粮食加工中,适应粉尘较多的作业场景。六轴机械手原理
码垛机械手是一种专为袋装物料设计的自动化设备,通过大面积吸盘实现稳定抓取。在化肥生产车间,码垛机械手可抓取重量达1吨的编织袋,按预设模式进行码垛作业。设备采用防滑吸盘纹理,增强与袋装物料的摩擦力,避免搬运中滑落。其配备的防尘罩有效隔离粉尘,延长设备使用寿命。码垛机械手表面进行防腐蚀处理,适应酸碱性环境,维护时只需定期更换滤芯即可保持性能。此外,设备支持与自动包装线联动,通过传感器实时监测物料流量,实现无人化生产。其模块化设计允许根据袋装尺寸调整吸盘布局,提升设备通用性。六轴机械手原理