商机详情 -
舟山工业机械手设备
桁架机械手动作原理?由于桁架机械手输送的速度快、加速度大、加减速时间短,当输送较重的工件时,由于惯量大,伺服驱动电机要有足够的驱动和制动的能力,支撑元件也要有足够的刚度及强度。只有这样,才能使伺服电动机满足桁架机械手输送的高响应、高刚度及高精度要求。由于桁架机械手输送的速度快、加速度大、加减速时间短,当输送较重的工件时,由于惯量大,伺服驱动电机要有足够的驱动和制动的能力,支撑元件也要有足够的刚度及强度。只有这样,才能使伺服电动机满足桁架机械手输送的高响应、高刚度及高精度要求。机械手设备,就选浙江勃展工业自动化设备有限公司,欢迎来电!舟山工业机械手设备
原材料多样化第1大类是机械制造业包括机械加工、轻工机械等以金属材料作为加工的原料,如钟表、缝纫机、自行车和家用电器等耐用消费品的加工。第二大类是以农、林、牧、副及化工产品等非金属材料作为加工的原料,如食品机械中的糕点机械以农产品为主要原料;罐头、酿造机械以农、副产品为主要加工原料;制浆造纸机械以林产品和农副产品为原材料;皮革机械以畜牧产品为主要原料;陶瓷、玻璃、塑料机械则以矿物、化工产品为其原料。其表明自动化机械手及自动生产线应用领域广。舟山工业机械手设备浙江勃展工业自动化设备有限公司为您提供机械手设备。

数控桁架机械手的位置再现性是对精度的统计。即使在相同的环境、相同的条件、相同的动作、相同的命令下,机械手也可能不会*匹配每个动作的位置,从而产生一定的误差。但是,可控机械手的误差在一定范围内。在测试桁架机械手的位置再现性时,在不同的速度和方向进行的迭代测试越多,位置再现性评估就越准确。位置再现性不受负载变化的影响。因此,位置再现性指标通常被用作示教/再现模式下机器人水平的重要指标。机器手的准确度取决于驱动和反馈装置的分辨率。重复精度比单次精度更重要,如果定位精度不够准确,通常会看到可预测的固定误差,可以通过编程进行修复。再现性定义了通过重复一定次数的运行确定的随机误差范围。来自实验室的一整套气动伺服技术和气动伺服定位系统,此外还开发了微电子技术和***的控制技术。
桁架机械手广泛应用于文娱范畴。医疗范畴:主要用于帮忙护理结束一些日常作业,例如,协助医生运送药品,以及在病房内主动监测空气质量等。运用桁架机械手也能够协助医生结束一些很困难的手术,比方,眼睛手术,大脑手术等等。桁架机械手是一种建立在直角X,Y,Z三坐标体系基础上,对工件进行工位调整,或结束工件的轨迹运动等功用的全主动工业设备。采用了Z新的plc操控技能以及伺服运动操控技能,使机械手功率更高、运用范围更广、工艺愈加安稳便当。整个工艺流程有机械手操控体系主动结束,可结束智能检测,主动报警等功用。能够在必定范围内进行任意组合,可结束对车床、加工中心、插齿机、电火花机床、磨床等类设备的主动化生产线改造。桁架式机械手相当于人的臂,但桁架机械手依靠机器工作。
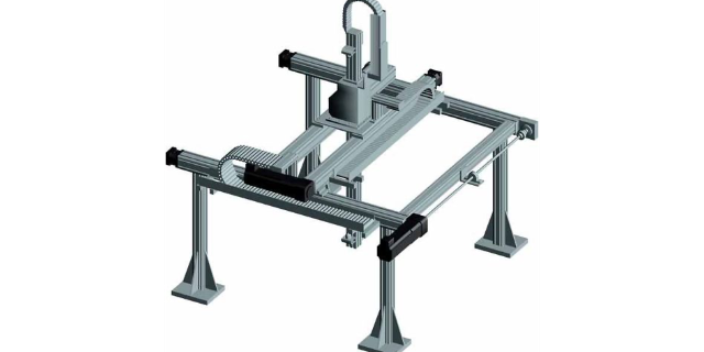
桁架机械手组成结构和原理。桁架机械手主要完成机床制造过程的全自动化,采用集成加工技术,适用于生产线上下料、工件旋转、工件排序等。数控桁架机械手由机体、驱动系统和控制系统三个基本部分组成。根据重型桁架机械手制造商的说法,机器人的结构将其分类为笛卡尔坐标系,机械手沿二维笛卡尔坐标系移动。主要部分通常采用龙门式结构,由Y向横梁和导轨、Z向滑枕、十字滑台、立柱、过渡连接板和底座组成,齿轮随Y向横梁和固定齿条转动。z方向的滑枕带动运动部件沿导轨快速运动。2.浙江勃展工业自动化设备有限公司是一家专业提供机械手设备的公司,期待您的来电!舟山工业机械手设备
浙江勃展工业自动化设备有限公司致力于提供 机械手设备,欢迎您的来电!舟山工业机械手设备
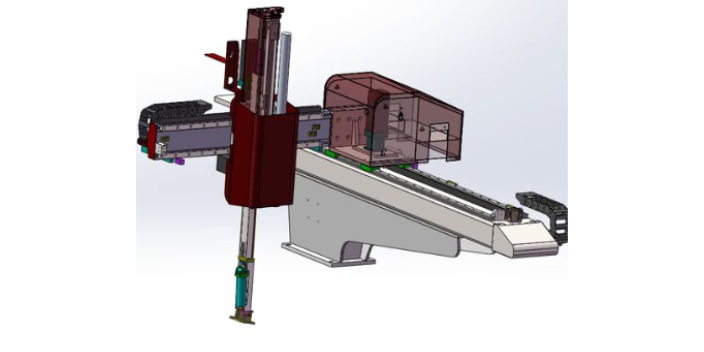
一般来说,数控桁架机器手具有相对简单的结构,包括执行系统、驱动系统、控制系统和方位检测系统。能完成企业生产加工商品的任务。桁架机械手一、执行系统桁架的执行系统负责主要的操作任务,其组成部件很多,如机械手、手腕、手臂、立柱等。机械手即直接参与加工生产商品的部分,通常与商品接触。手腕作为机械手和手臂之间的连接,可以调节所接触物品的方位。手臂也是执行系统中的关键部件,它和立柱是整个操作任务的骨干。不用说,底座是整个执行系统的基础部分。无论机械手、手腕、手臂等的运动,建立在基础上的。舟山工业机械手设备