商机详情 -
测量解决方案机械结构
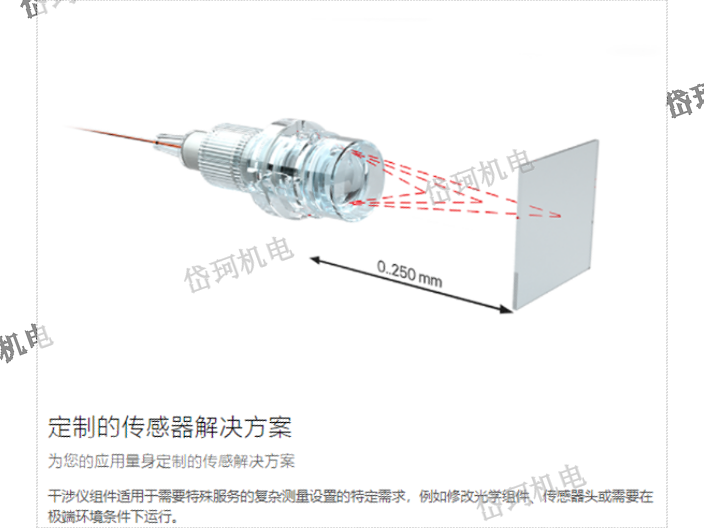
光传感器通常是指能敏感由紫外光到红外光的光能量,并将光能量转换成电信号的器件。光传感器是一种传感装置,主要由光敏元件组成,主要分为环境光传感器、红外光传感器、太阳光传感器、紫外光传感器四类,主要应用在改变车身电子应用和智能照明系统等领域。现代电测技术日趋成熟,由于具有精度高、便于微机相连实现自动实时处理等优点,已经广泛应用在电气量和非电气量的测量中。然而电测法容易受到干扰,在交流测量时,频率响应不够宽及对耐压、绝缘方面有一定要求,在激光技术迅速发展的当今,已经能够解决上述的问题。直接需求分析的管理原则。测量解决方案机械结构
解决方案
3. 采用小孔出气**技术,耗气量为30L/Min,在轴承间隙形成冷凝区域,抵消轴承运动摩擦带来的热量,增加设备整体热稳定性。仔细研究各厂家的技术指标,会发现:欧潼精密的耗气量为30L/Min,而其他的厂家在50-150L/MIN之间. 按照物理学理论,当气体以一定的压力通过圆孔的时候,会因为气体摩擦产生热量,在高精密测量中,微小的热量也会影响精度的稳定性,而当出气孔的孔径小于一定的直径的时候,却会相反的会在出气孔的周围形成冷凝效应! 正是利用这一物理学原理,采用欧潼小孔出气的技术,使得冷凝效应恰恰抵消测量中因为空气摩擦产生的微弱热量,使得设备保持长时间的温度稳定性,从而保证精度稳定性!测量解决方案机械结构在某些领域,解决方案不止是针对问题本身,也必须考量到需要服务的对象。

7. 开机顺序依次为:打开①电源箱;②总气源;③冷干机;④气阀;⑤控制柜电源;⑥测座控制器;⑦当操作盒灯亮后给电机加电(急停键必须松开);⑧待系统自检完毕,启动测量软件,三轴归零(回家)“确定”,自动完成后进入正常工作状态。
8. 每次开机后先回机器零点。在回零点前,先将测头移至安全位置,保证测头复位旋转和Z轴向上运动时无障碍。
9. 更换测头时,使用随机提供的独一工具,所使用的测头需要标定:① 在未打开测量软件状态下,更换后开启软件。建议使用此方法。② 在打开测量软件状态下,操作盒需按下急停键开关,更换后开启开关。会出现测头错误信息对话框,关闭即可(或在网址输入栏中输入100.0.0.1,进入Errors History查看错误信息),此信息在下次开机时自动清理。
10. 在手动操作状态下,在接近采点位置时,要按下慢速键。
磁场
磁场方向有规定,磁针静止北极指。
磁体外部磁感线,北极(N)出发回南极(S)。
地球周围地磁场,沈括发现磁偏角。
电生磁
电流周围有磁场,证明丹麦奥斯特。
通电螺管磁极判,安培定则伸右手。
四指沿着电流走,旋转方向不能反。
大拇所指为N极,掌切所标为S.
电磁铁
螺管磁性强弱定,电流匝数插铁芯。
带有铁芯螺线管,通常叫做电磁铁。
开关控制磁有无,电流控制磁强弱。
电动机
通电线圈磁场中,受力作用会转动。
定子不动转子转,持续转动换向器。
控制方便效率高,电能转化机械能。 这个问题是否侧面反映了其他的潜在问题,怎样避免这些问题,本次的解决方案有哪些经验积累等等类似的思考。
2、打表测量法:打表测量法是将被测零件和测微计放在标准平板上,以标准平板作为测量基准面,用测微计沿实际表面逐点或沿几条直线方向进行测量。打表测量法按评定基准面分为三点法和对角线法:三点法是用被测实际表面上相距较远的三点所决定的理想平面作为评定基准面,实测时先将被测实际表面上相距较远的三点调整到与标准平板等高;对角线法实测时先将实际表面上的四个角点按对角线调整到两两等高。然后用测微计进行测量,测微计在整个实际表面上测得的比较大变动量即为该实际表面的平面度误差。解决方案必须是客观的。测量解决方案机械结构
传统的概念来说,解决方案的目的是解决问题,它的任务到此为止。测量解决方案机械结构
9.水平臂测量台移动型(Movingtablehorizontalarmtype)
水平臂测量台移动型,厢形架支撑水平臂沿着垂直的支柱在垂直(轴)的方向移动。探头装在水平方向的悬臂上,支柱沿着水平面的导槽在轴方向移动,且垂直轴,测量台沿着水平面的导槽在轴方向移动,且垂直于轴和轴。这是水平悬臂型的改良设计,为了消除水平臂在轴方向,因伸出或缩回所产生的挠度。
10.水平臂测量台固定型(Fixedtablehorizontalarmtype)
水平臂测量台固定型,其构造与测量台移动型相似。此型测量台固定,、轴均在导槽内移动,测量时支柱在轴的导槽移动,而轴滑动台面在垂直轴方向移动。 测量解决方案机械结构