新闻中心 - 扬州熙岳智能科技有限公司
-
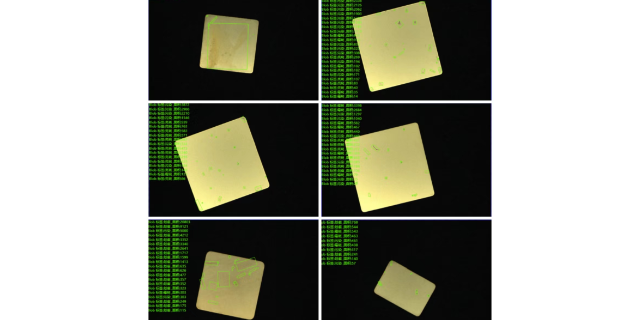
 南京铅酸电池瑕疵检测系统功能
南京铅酸电池瑕疵检测系统功能瑕疵检测技术的未来发展将呈现几个鲜明趋势:1)自适应与自学习系统:系统将不再是执行预设规则的静态工具,而是能够根据产品型号自动切换参数、根据环境变化(如光照衰减)自我校准、并能从少量新样本中快速学习新...
发布时间:2026.03.04 -
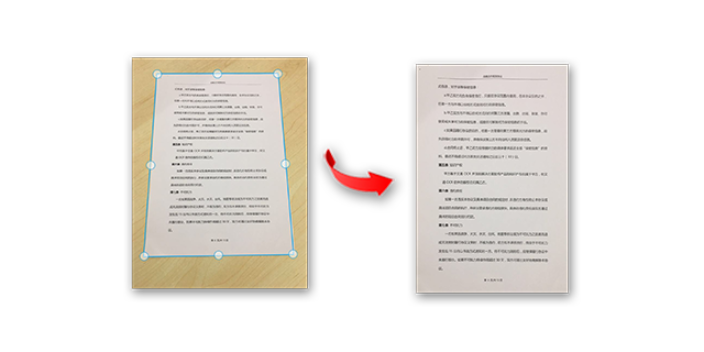
 河南电池片阵列排布定制机器视觉检测服务服务价格
河南电池片阵列排布定制机器视觉检测服务服务价格我们的定制视觉检测服务,为您的企业提供品质保障。从方案设计到售后运维,我们始终以保障企业品质为目标。方案设计阶段,会结合行业标准与企业质量要求,制定覆盖生产全流程的检测方案,如原材料入库检测、半成品加...
发布时间:2026.03.02 -
 淮安传送带跑偏瑕疵检测系统售价
淮安传送带跑偏瑕疵检测系统售价一个成功的瑕疵检测系统不*是算法的胜利,更是复杂系统工程集成的成果。它必须作为一台“智能设备”无缝嵌入到现有的自动化生产线中。这涉及到精密的机械设计:包括传送带的同步控制、产品的精确定位与翻转机构、不...
发布时间:2026.02.28 -
连云港零件瑕疵检测系统供应商
尽管发展迅速,瑕疵检测系统仍面临诸多挑战。首先是数据难题:深度学习依赖大量标注数据,而工业场景中严重瑕疵样本稀少、收集困难、标注成本极高。解决方案包括小样本学习、迁移学习、生成对抗网络(GAN)合成缺...
发布时间:2026.02.13 -
 徐州智能瑕疵检测系统价格
徐州智能瑕疵检测系统价格瑕疵检测技术的未来演进将紧密围绕云计算、边缘计算和人工智能的融合展开。云视觉平台允许将图像数据上传至云端,利用其近乎无限的存储和计算资源,进行复杂的分析、模型训练和算法迭代,尤其适合处理分布式工厂的数...
发布时间:2026.02.09 -
 广东水果智能采摘机器人用途
广东水果智能采摘机器人用途采摘机器人的机械臂设计充满仿生智慧。多关节柔性臂常采用碳纤维材质,在保证负载能力的同时实现蝴蝶振翅般的轻柔运动。末端执行器则是工程学杰作:针对葡萄等脆弱浆果,会使用负压气流吸附配合硅胶托盘;采摘柑橘类...
发布时间:2026.02.07 -
 北京压装机定制机器视觉检测服务服务价格
北京压装机定制机器视觉检测服务服务价格我们的定制视觉检测,为您的企业提供精确的品质支持。精确的品质支持体现在检测全流程的把控。方案设计时,会根据企业产品的质量标准,将检测指标量化,如外观缺陷的判定标准细化为 “划痕长度≤0.5mm、宽度≤...
发布时间:2026.02.01 -
安徽传送带跑偏瑕疵检测系统价格
在半导体、PCB(印刷电路板)、显示屏等精密电子制造领域,瑕疵检测系统扮演着“工艺守护神”的角色。以OLED显示屏为例,其生产工艺复杂,可能出现的瑕疵包括亮点、暗点、Mura(辉度不均)、划伤、异物、...
发布时间:2026.01.30 -
 河南铅酸电池定制机器视觉检测服务价格低
河南铅酸电池定制机器视觉检测服务价格低定制视觉检测服务,让您的产品检测更加高效、准确。传统人工检测依赖人工逐一排查,不每人每小时能检测数十件产品,还易因疲劳、视觉误差导致漏检、误检。而定制视觉检测服务搭载高速工业相机与智能算法,每秒可完成...
发布时间:2026.01.27 -
 盐城传送带跑偏瑕疵检测系统服务价格
盐城传送带跑偏瑕疵检测系统服务价格瑕疵检测系统的未来愿景,将超越“事后剔除”的被动角色,向“事前预防”和“过程优化”的主动质量管理演进。通过与物联网(IoT)技术的深度结合,系统采集的海量质量数据将与生产线上的传感器数据(温度、压力、...
发布时间:2026.01.24 -
 河南视觉检测设备生产厂家
河南视觉检测设备生产厂家半导体行业对产品检测精度要求极高,尤其是在芯片封装环节,任何微小的误差都可能导致芯片失效。熙岳智能凭借在视觉检测领域的专业技术和丰富经验,为半导体行业定制研发了的视觉检测设备。该设备采用了超精密的光学...
发布时间:2026.01.22 -
 山东定制机器视觉检测服务价格
山东定制机器视觉检测服务价格在现代化农业生产中,定制机器视觉技术正发挥着越来越关键的作用。在果蔬采后处理环节,先进的视觉分选系统能够实现多维度的品质检测,包括外观尺寸分级、颜色均匀度评估,以及通过近红外光谱技术无损检测内部糖度、...
发布时间:2026.01.20